2021年度の研究テーマ
Teleoperation of Mobile Robot by Walking Motion Using Saddle Type Device
(サドル型デバイスを用いた歩行動作による移動ロボットの遠隔操作)


In this study, we focus on walking motion as a way of teleoperating mobile robot intuitively. To realize
teleoperation by walking motion, we use saddle type device as a locomotion interface which offers safe and
stable walking. In teleoperating the robot by walking motion, we invented the original algorithm to make the
robot move forward continuously. The result shows we can get the robot to move forward continuously, not
intermittently.
本研究では,我々は移動ロボットを直感的に遠隔操作する手段として人間の歩行動作に焦点を当てます.歩行動作による移動ロボットの遠隔操作を実現するために,我々は安全性や安定性を提供するロコモーションインターフェースとしてサドル型デバイスを使用します.移動ロボットを遠隔操作する上で,我々は移動ロボットを連続的に前進させるための独自のアルゴリズムを構築しました.その結果として,我々は移動ロボットを断続的ではなく,連続的に前進させることを可能にしました.
関連文献
Shunsuke KUME, Masamichi SAKAGUCHI (2021) Teleoperation of Mobile Robot by Walking Motion Using Saddle Type
Device. In: Stephanidis C., Antona M., Ntoa S. (eds) HCI International 2021-Posters. HCII 2021.
Communications
in Computer and Information Science, vol 1420. Springer, Cham.
2020年度の研究テーマ
電気刺激と映像を併用した運動錯覚の生起に関する研究

錯覚を利用したリハビリテーションシステムの開発を行っています.外部からの視覚・触覚刺激等によって,身体を自身の意思で動かしていないにも関わらず「動かした」と感じる錯覚を運動錯覚と呼びます.この錯覚はリハビリテーションに利用することで効果が得られることが知られています.本研究では,電気刺激による強制的な身体運動と身体が動く様子の映像を同時に提示することで,運動錯覚の生起させるシステムを作成しました.このシステムにより,電気刺激と映像刺激の併用が運動錯覚に効果を及ぼすことを確認しました.
関連文献
森大樹, 坂口正道: "電気刺激と映像を併用した運動錯覚の生起に関する研究", ロボティクス・メカトロニクス講演会2020, 1P1-O09, 2020.
森大樹, 坂口正道: "電気刺激と映像を併用した運動錯覚の生起に関する研究 -電気刺激の強度と運動錯覚の関係について-", 第21回システムインテグレーション部門講演会(SI2020), pp.1918-1921,
2020.
遠隔参加可能なグラウンドゴルフシステムの開発

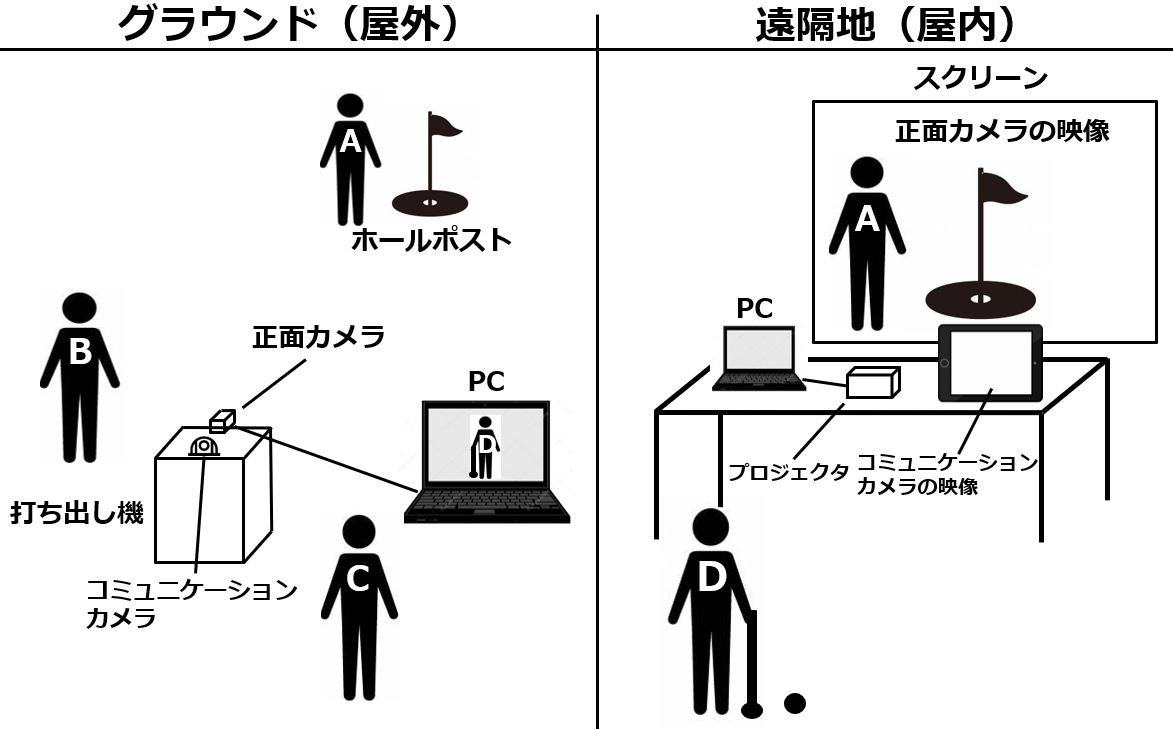
遠隔参加可能なグラウンドゴルフシステムの開発を行っています.近年,高齢者が体を動かしながら友人と交流が可能な場としてグラウンドゴルフが広まっています.本研究では身体的,環境的な問題により屋外でグラウンドゴルフができなくなった人が,自宅でもプレー可能なシステムを提案します.自宅にいる人に対し,グラウンドゴルフの現場の映像や音を提示,現場の人には自宅にいる人の映像や音を提示することで,遠隔地間のコミュニケーションを可能にします.また自宅でのクラブのスイングに合わせ,現場でボールを打ち出す装置により,現場の人と一緒にプレーを可能にします.本システムにより遠隔地にいる人との新しいコミュニケーションの方法を目指していきます.
関連文献
山田真一, 坂口正道: "遠隔参加可能なグラウンドゴルフシステムの開発", 第21回システムインテグレーション部門講演会(SI2020), pp.381-385, 2020.
気化熱を利用した冷感提示システムの開発に関する基礎研究

気化熱を利用して体に冷感を提示するシステムの開発を行っています.液体の物質が気体になるときに周囲から吸収する熱のことを気化熱といい,体温調節にも利用されています.人は暑い場所にいると汗を掻き,風を受けることで汗を蒸発させ,体から気化熱を奪うことで体温を下げています.しかし,汗を掻くと体がべとつき,不快に感じてしまいます.そこで,汗の代わりに水滴を蒸発させることで,快適に体温を下げることができるのではないかと考えました.本研究では背中に提示部を装着し,水と空気を送ることで提示面に冷感を提示できるシステムを開発しました.
関連文献
福田和也,坂口正道:“空気の隙間流れを利用したエアスーツの開発に関する基礎的検討” ,第21回システムインテグレーション部門講演会(SI2020),pp.688-692,2020.