サドル型ランニングデバイスに関する研究
視覚および聴覚を利用したVR走行における他者の存在感に関する研究
VRにおける他者の存在の提示方法については,ウェアラブルデバイスである骨伝導ヘッドセットを用いた聴覚情報と, 単一の液晶ディスプレイを用いた視覚情報の両方を用いることができる. 私たちは,人が他者についてどのように感じるのかを調査した.
関連文献
高村莉玖, 坂口正道: 視覚および聴覚を利用したVR走行における他者の存在感に関する研究, ロボティクス・メカトロニクス講演会2024, 2P2-S05, 2024

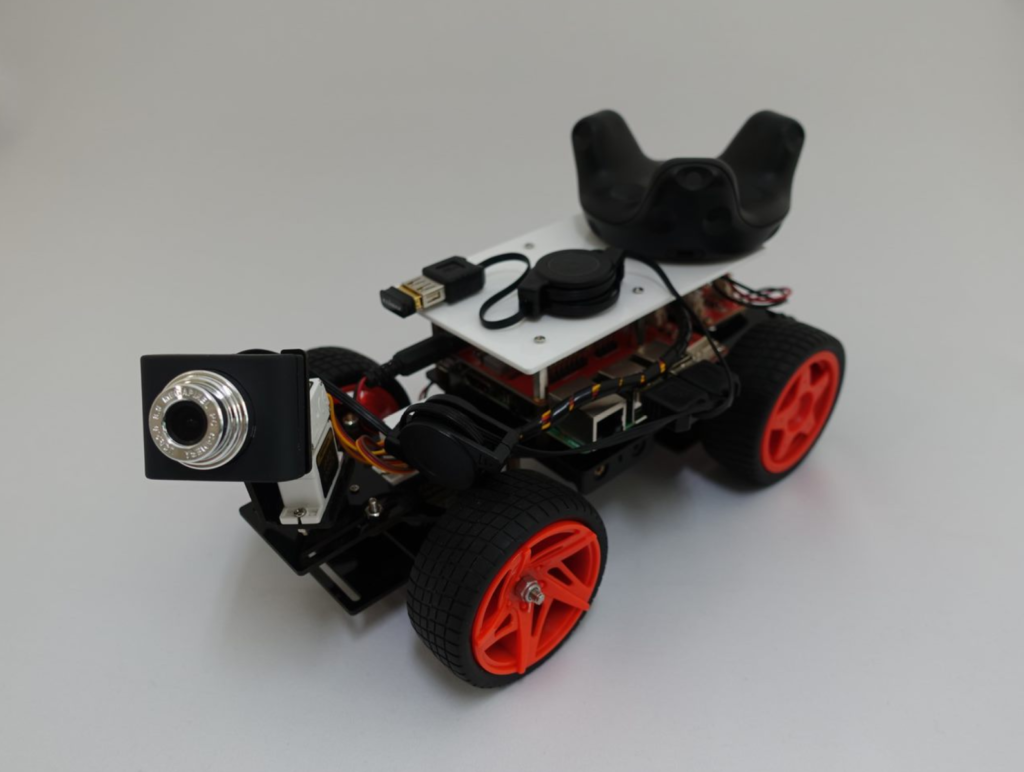
サドル型デバイスを用いた歩行動作による移動ロボットの遠隔操作
本研究では,我々は移動ロボットを直感的に遠隔操作する手段として人間の歩行動作に焦点を当てます.歩行動作による移動ロボットの遠隔操作を実現するために,我々は安全性や安定性を提供するロコモーションインターフェースとしてサドル型デバイスを使用します.移動ロボットを遠隔操作する上で,我々は移動ロボットを連続的に前進させるための独自のアルゴリズムを構築しました.その結果として,我々は移動ロボットを断続的ではなく,連続的に前進させることを可能にしました.
関連文献
Shunsuke KUME, Masamichi SAKAGUCHI (2021) Teleoperation of Mobile Robot by Walking Motion Using Saddle Type Device. In: Stephanidis C., Antona M., Ntoa S. (eds) HCI International 2021-Posters. HCII 2021. Communications in Computer and Information Science, vol 1420. Springer, Cham.