テクスチャ触覚提示に関する研究
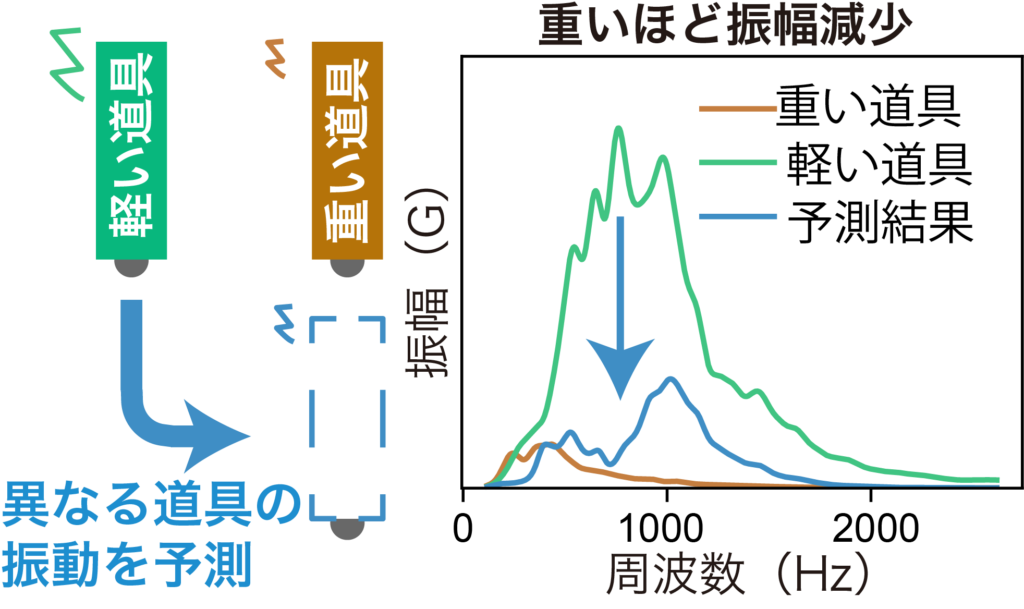
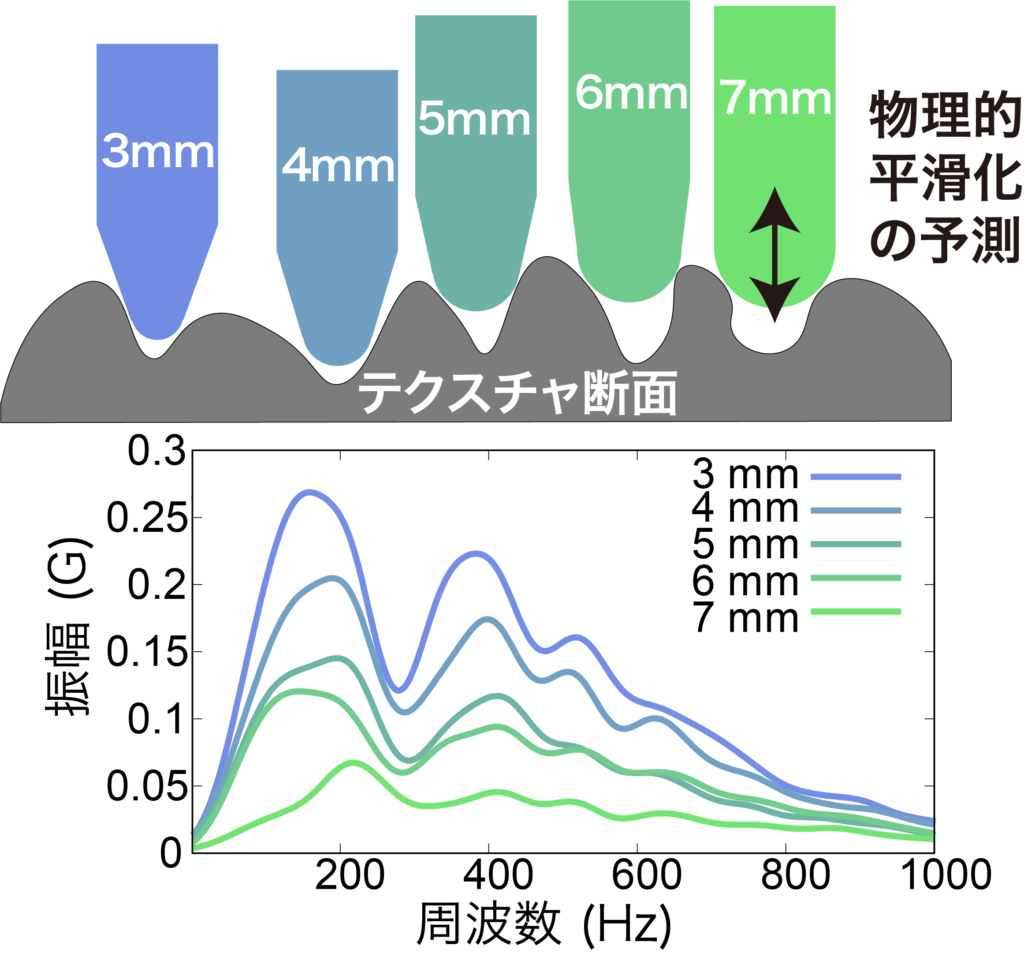
道具の材質や形状の違いを再現するモデルの開発
本研究は、テクスチャ表面をなぞる道具の材質や先端部の形状による振動感覚の違いを再現することを目的としている。材質による違いは例えば重さや減衰比によって振動振幅が大きく変わることが計測的に分かっている。これまでのところ、従来法である同定用の振動を使って材質による伝搬特性を同定しても振動が再現できないことまで判明している。また、先端部の形状は凹凸面への侵入深さに影響することが分かっており、本研究の計測による取り組みで振動スペクトル上では振幅が全体的に遷移していく様子が観測された。現在は、これらの観測的事実と知見に基づいたモデル化手法を試験している。このモデルの実現によって、様々なバーチャルコンテンツ全般における道具操作感覚の設計や実装が容易になることが期待される。
振動特性とテクスチャ特徴の回帰によるテクスチャミキシングシステム
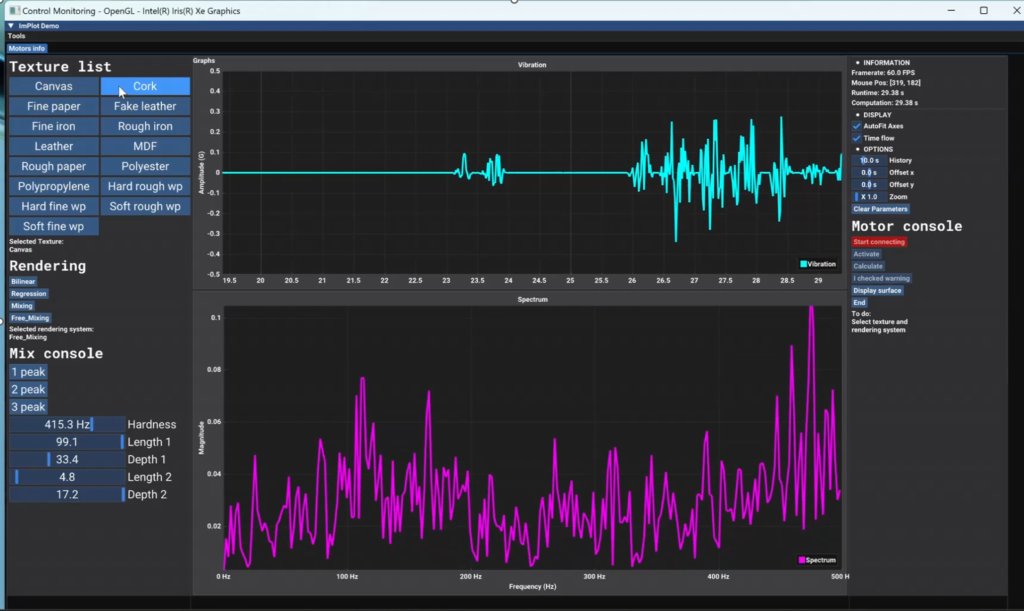
本研究は、ゲームや製品開発における触覚デザイナー向けの仮想上で様々なテクスチャを試験できるテクスチャミキシングシステムを提案する。本システムは従来の記録データに基づくテクスチャモデルを2層の回帰モデルに置き換えることによって実現している。従来のなぞる速度や力と振動スペクトルを表現するモデル係数の応答を1層目の重回帰モデルで表現した。この1層目の重回帰係数はすなわちそのテクスチャのモデル特徴と言える。2層目の重回帰モデルではテクスチャの特徴(例えば硬度や溝の幅)を入力とし、この1層目の重回帰係数を出力とすることで、テクスチャ特徴量に対応したテクスチャ振動が生成される。主観的な評価では約6割のテクスチャにおいて、従来と同等の再現性能を維持し、さらに1分程度で目標のテクスチャを作り出すことに成功した。重回帰モデルを使用することで、様々なテクスチャを作り出せるにも関わらず、演算速度を維持したままのレンダリングを実現した。
関連文献
Tozuka, K., Poitrimol, B., Sasaki, G. et al. Integrating texture models through regression of vibration and texture characteristics. Robomech J 12, 25 (2025).
Keisuke Tozuka, Genki Sasaki, Masamichi Sakaguchi: Subjective Evaluation of the Predictive Performance and Operability of a Two-Layer Regression-Based Texture Mixing System, IEEE Transaction on Haptics, 2025/12(提出).
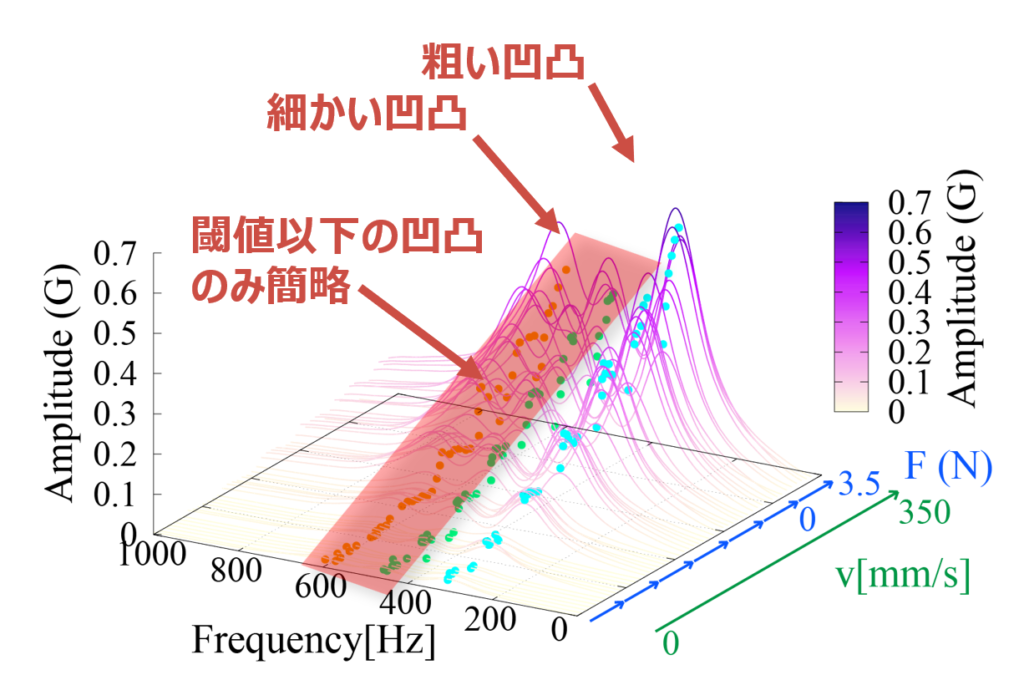
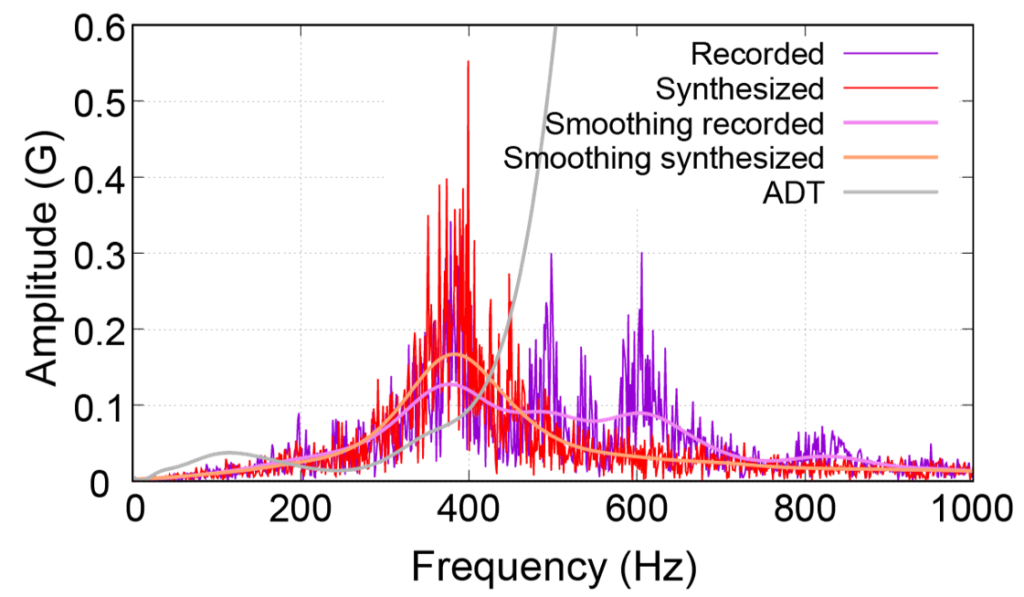
力学的・知覚的ルールに基づくテクスチャモデリングの簡略化
本研究は、仮想上でテクスチャに触れた感覚を再現するテクスチャモデルの軽量化を目的としている。モデル式をARモデルではなくパラメトリックイコライザとすることで演算する係数の数を2分の1に縮小した。さらに、力学的・知覚的ルールに基づいて再現するスペクトルのピークを取捨選択することでモデル簡略化を行い、演算速度が約4分の1程度まで短縮された。知覚的ルールである加速度知覚閾値以下のピークを除外したことで、主観的な評価においても除外前と同等の再現性が維持された。この研究によって、例えばマイクロコンピュータ上でのテクスチャモデルの実装によるウェアラブル化や、複雑なポリゴンとの当たり判定、力覚演算との組み合わせが容易に実装可能となる。
関連文献
K. Tozuka and H. Igarashi, “A Simplified Texture Modeling Using a Physical and Perceptual Rule-Based Approach,” in IEEE Access, vol. 12, pp. 59868-59879, 2024.