筆記動作に関する研究
主導を意識した両手把持式VR書字訓練システムの開発
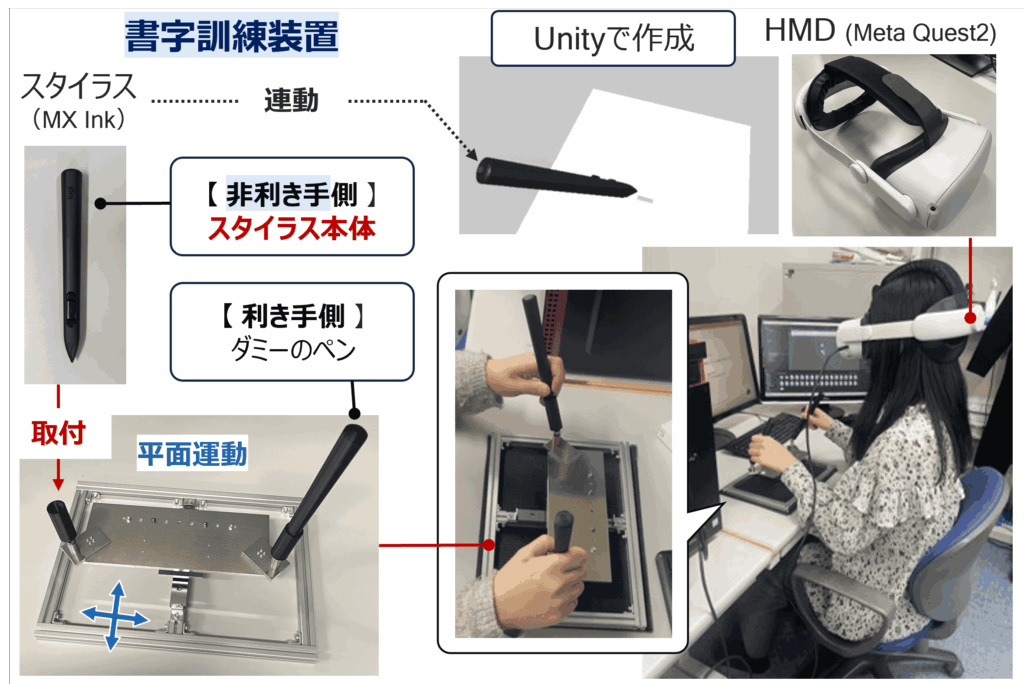
非利き手の書字能力の向上を目的とし,「両手運動」と「錯覚(VR)」を組み合わせた両手把持式のVR書字訓練システムを作成した.また制御の主導を利き手から非利き手へと段階的に移すことで能力の伝達を図った.評価実験では,両手訓練群と片手訓練群に分け,3日間における運筆能力の向上についてRMSE(理想線とのズレ)を主要指標として比較・評価した.結果,直線課題では改善や群間差は出なかったものの,曲線課題においては両手訓練群が有意に改善した.また片手訓練群と比較しても改善幅が大きいと示唆された.以上から今回提案した訓練手法は,より難易度の高い課題に対して有効である可能性が示された.
関連文献
坂部瑶弥,戸塚圭亮,坂口正道:非利き手の筆記能力向上を目指した両手接続訓練法の提案,第26回計測自動制御学会システムインテグレーション部門講演会,2E4-18,広島,2025/12.
書字動作支援システムの開発
書字動作支援ロボットの開発を行っています.書道教室などで,先生が生徒の手を取って一緒にきれいな文字を書くという指導が行われています.私が開発したロボットは,この先生のように書き手と一緒にペンを握って適切な力を加えることで,きれいな文字を書く支援を行います.始めは,ロボットに強制的に動かされていると感じる問題がありました.そこで,人が実際に文字を書く時の動きを研究したところ,書く線の曲がり方によって速度が変化していることが分かりました.ロボットにこの速度を再現させることで違和感を小さくすることに成功しました.現在は,お手本通りではなく個人の特徴を残したまま文字をきれいにする支援を目指しています.
関連文献
名知貴明,坂口正道:位置と速度による受動的な書字動作支援システムの開発,日本機械学会ロボティクス・メカトロニクス講演会2015 (Robomech2015),1P1-H10 (2015).

